
Physics-Based and Data-Driven
A sneak peak at our upcoming PSIG presentation



Introduction
While the differences between onshore and offshore oil and gas fields can vary significantly in terms of cost, time scales, and operational approaches, certain challenges remain universal. One such challenge is the management of liquids in multiphase pipelines, where both liquid and gas phases are present.
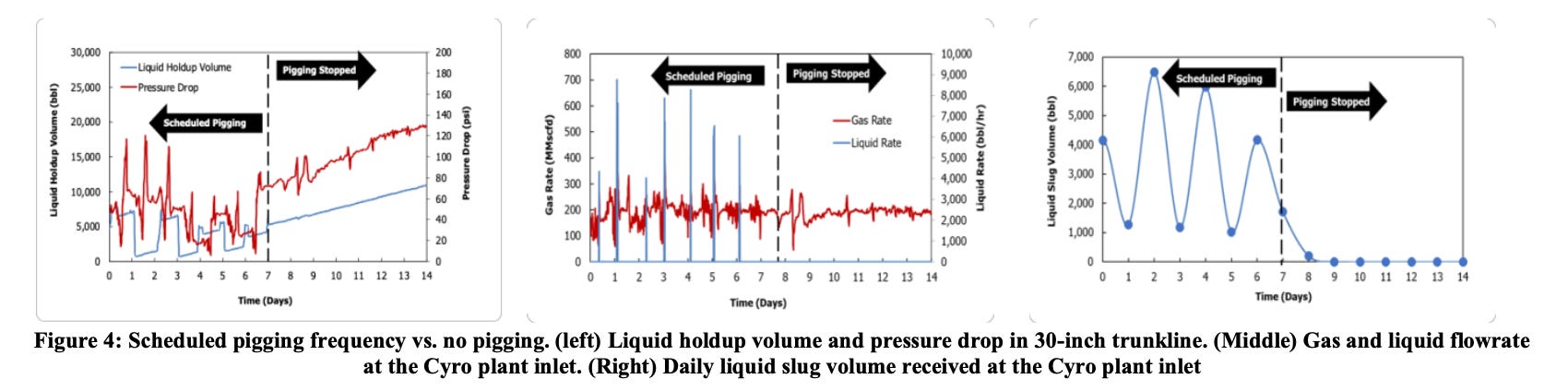
In the case of onshore gathering systems, most often times multiphase pipelines require regular pigging. Without this, liquids build in the system leading to pressure increases, which negatively impact well production, or for midstream companies, reduce their capacity to accept volume.
This week we are presenting on this exact topic at the 2025 Pipeline Simulator Interest Group (PSIG) conference held in Seattle, Washington. In anticipation of that, we thought we’d share a sneak preview of our paper and presentation. Starting first with the abstract:


The Challenges
The approach to helping operators with liquid management challenges typically begins with physics-based modeling. Specifically, tools such as OLGA are utilized that can model the multiphase and transient dynamics of the system as liquids build and pigging operations are carried out.
But as we point out in the paper, the particular system we are focused on, has made physics-based modeling a challenge for even the most seasoned OLGA modeler:
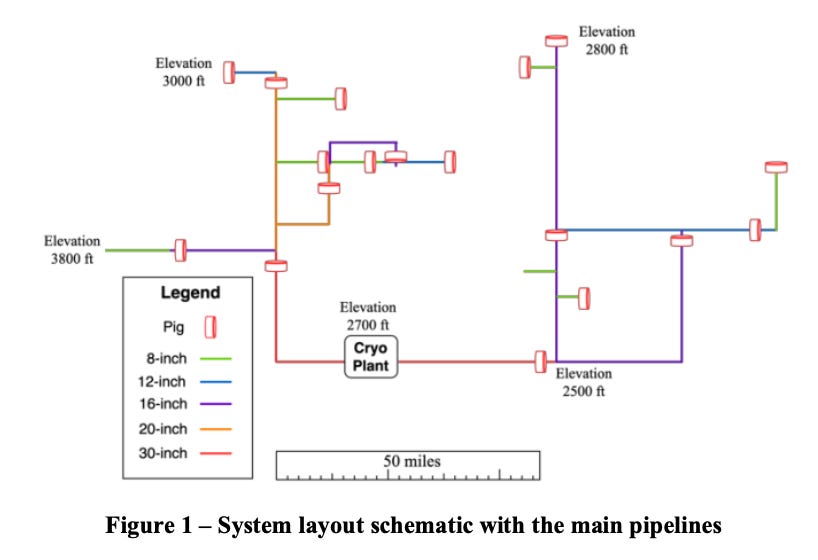
Network size - The midstream network spans over 300 miles of pipeline and 1,000 ft of elevation change
Compositional variations - Significantly varying compositions enter the network at different points and can change often by the day, leading to drastically different liquid condensation behavior
Temperature effects - Portions of the lines in the network are buried, yielding less seasonal fluctuations in liquid condensation, while other sections are exposed. Survey’s of the entire 300 miles of pipes have never been done with the extensive detail required to capture this
Existing pigging philosophy - At any one point in time, over 25 pigs exist in the network (with varying properties), making for a very complex modeling environment as the system never has a clean point to start from, nor does it ever reach “steady state”

The Goals
We are focused on a brown field, where unlike a green field in the design phase, simply increasing the capacity of the vessel that receives the liquid after pigging (i.e. the “slug catcher”) is not a cost efficient option. Instead, we are focused on a management approach to handling daily liquid slug volumes that breaks down into two primary goals:
Can we forecast what daily liquid volumes associated with pigging are going to look like for the next 1-6 months as the main inputs in the field change (rates, time of year, etc.)?
Can we understand on any given day, what does our liquid slug look like “tomorrow”. Or, more specifically, is tomorrow likely to give us a liquid slug that we can easily manage or one that will take down the whole facility.
Knowing these two pieces of information, the operator can begin to make both longer term changes to their system (within their budget) to accommodate upcoming changes in the not to distant future, while at the same time, they can give operations a heads up of what is coming at them the next day and whether they should make any immediate preparation steps.

Physics-Based
As alluded to above, the typical approach to take in solving these problems is one rooted in physics-based modeling. But the complexities of this network are no cake walk. Despite this, we’ve managed to produce successful modeling runs that give valuable insights into the key variables in the field and their impacts on longer term future behavior. As we state in the article:
For such a complex multiphase network, the traditional physics- based model does give insights into the system performance based on the first principles, which can guide the operational procedure optimization and the new system design.

Data-Driven
While the physics-based model does show value in longer term forecasting, cracks start to show, especially as operators want to answer the second question i.e. “what’s coming tomorrow”. In this case, the long run times and the sophisticated inputs become limitations to get results fast enough. Instead, we turned to data-driven modeling, utilizing the operators wealth of sensor data recording pressures, temperatures, and flowrates to answer daily questions.
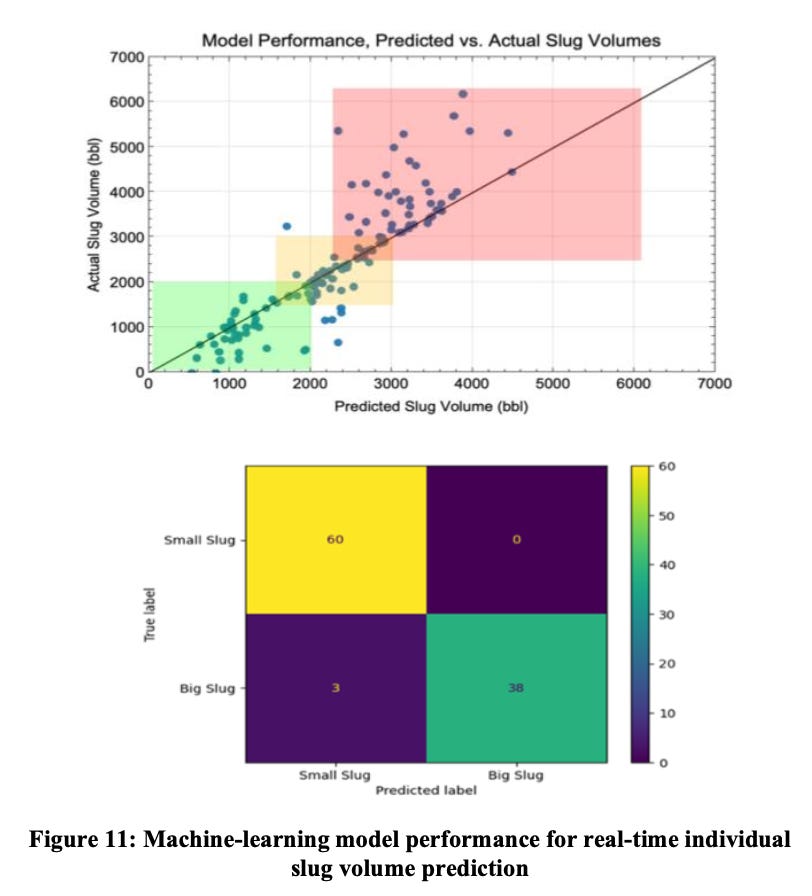
Taking the the last 48 hrs of data for any given day, we built a complex neural network, using various layers referred to as Long-Short Term Memory (LSTM’s), that could help predict the slug sizes expected “tomorrow”.
The model does quite well at predicting the actual expected liquid volumes expected each day as seen in the parity plot below. But, where it really shines is when turned into a classification model that simply answers whether tomorrow’s liquid slug will be “big” or “small” reaching an accuracy of over 97%.
As we mention in the article:
…with large sets of operational data available, machine-learning models can significantly improve the computational efficiency, while also providing the flexibility of model retraining to achieve the desired accuracy level over time.
Conclusions
This project has been a fascinating one to work on as it truly encapsulates the entire ethos of Pontem. It is only through the successful combination of deep technical knowledge from decades of experience and sophisticated physics-based modeling along with leveraging the latest in data-driven approaches and technology are we able to offer the operator a full solution to their challenges.
Stay tuned for the full release of the paper in the coming weeks and we look forward to seeing you in Seattle this week if you will be there!